CAMBER
Partners
Tarmac, Skanska, ABB, MTC, Loughborough University, Foster + Partners, BRE
Application
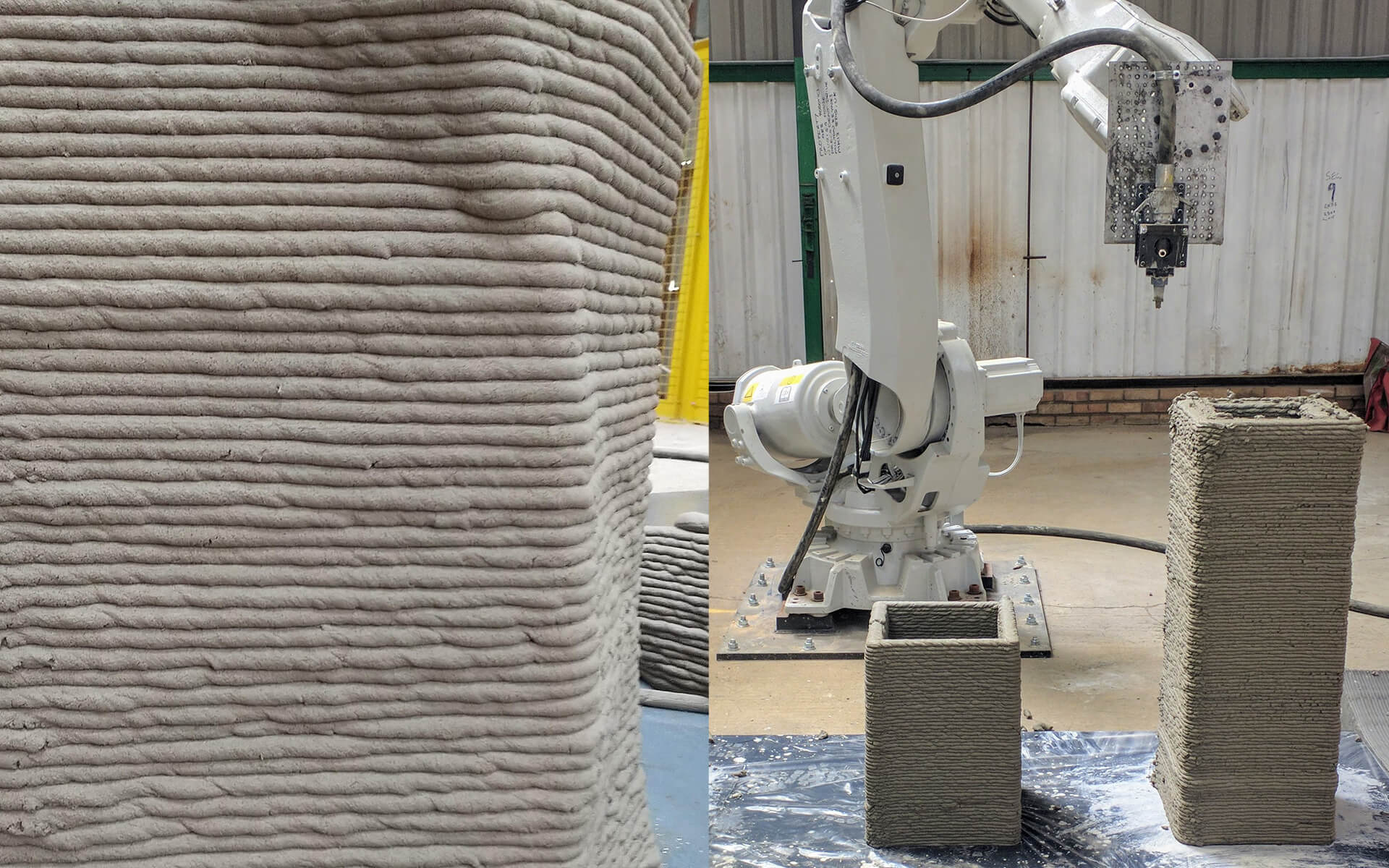
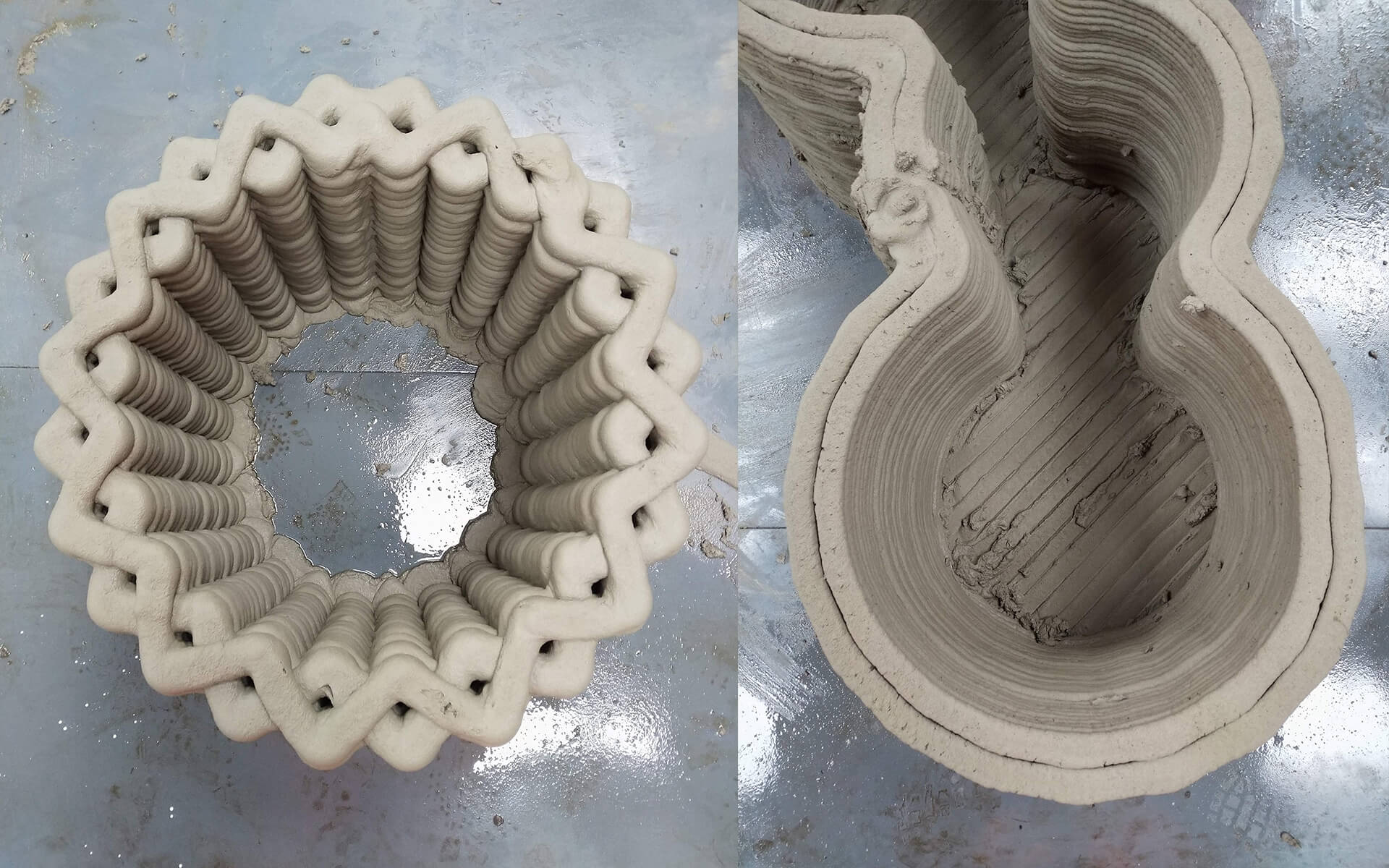
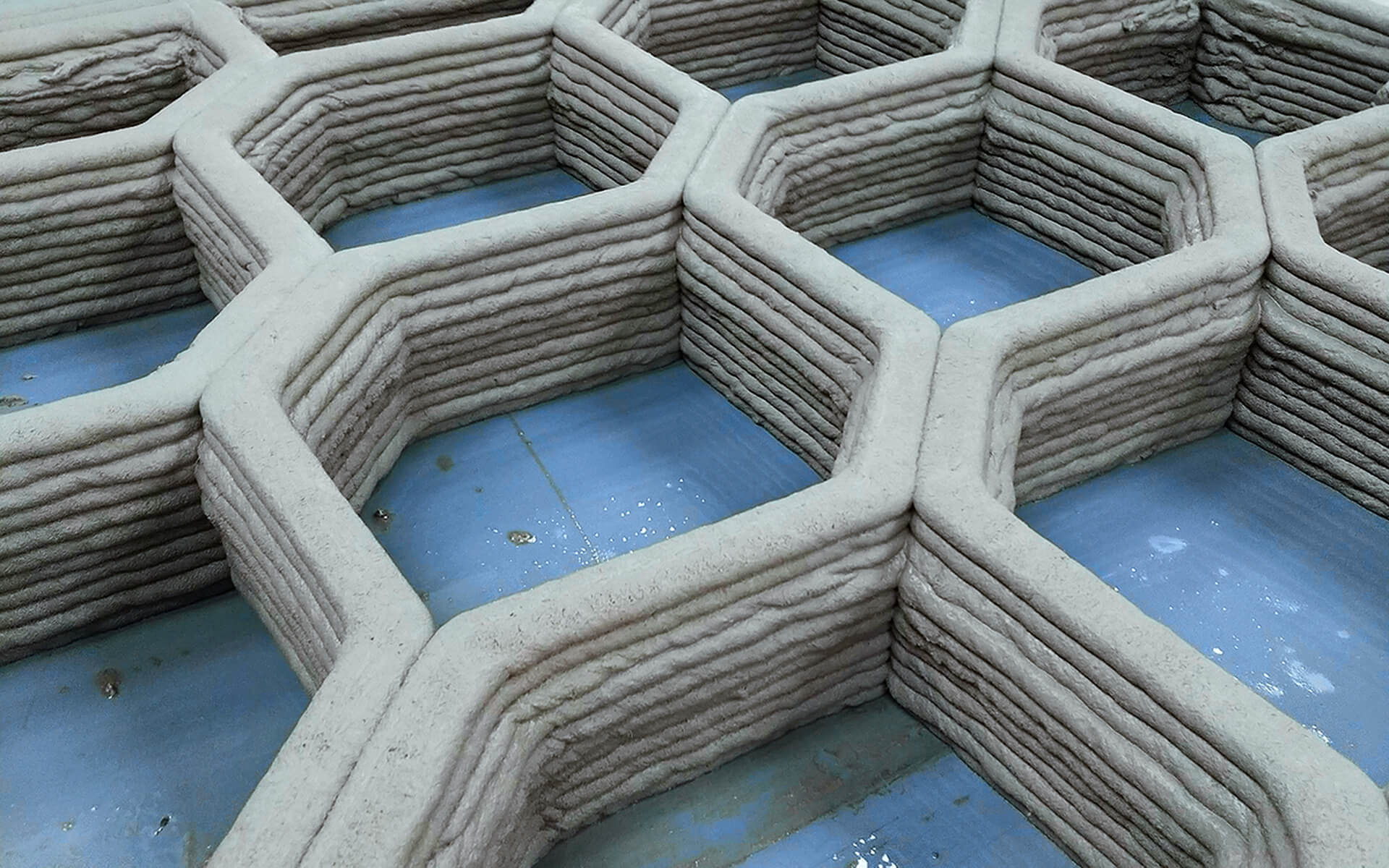
Concrete 3D Printing (3DCP)
Outcome
3DCP slicer adapted to robot constraints
The CAMBER project sought to industrialise 3D Concrete Printing (3DCP) for Tarmac. As the construction industry’s most widely used material the environmental impact of concrete is massive. 3DCP has the potential to reduce the amount of concrete used in any given component by selectively placing the material where, and only where, it is required.
HAL Robotics’ role within the project was to develop a tool which would greatly simplify the programming of the printing robot such that Tarmac’s operators could reprogramming the cell themselves. As a materials and pre-cast company, Tarmac’s engineers and operators know their concrete inside and out, however, they are not, and don’t want to be, robotics experts. To that end, we developed a customised user interface which worked on two levels. An advanced mode of the interface, intended for engineers, allowed fine-grained control of process and the slicing. This allowed them to load their parts, choose the slice orientation, infill patterns etc. and produce a parametric procedure for their cell with ample meta-data to ensure valid execution on the real machine. A simple mode allowed operators to make quick changes to their printing process based on the temperature, humidity or other environmental factors that impact the process immediately before producing a part. This interface is intended to be embedded into a portable version of the 3DCP cell which can create parts near-site.