Kawasaki robot programming software
human-robot collaboration software

deploy your Kawasaki robot arm in minutes
No need to be a Kawasaki robot programmer or use Kawasaki robot simulation software Kawasaki K-Roset to use Kawasaki robots! Discover DECODE, the best alternative to Kawasaki Robotics software Kawasaki K-Roset.
decode enables users with no robotics or programming expertise to flexibly automate new and variable tasks, that would require days of specialist work using Kawasaki K-ROSET, conventional offline robot programming (OLRP) software or leadthrough teaching
1
digital twin Kawasaki robot simulator and path-planner for Kawasaki robot arm and Kawasaki cobot: the best alternative to Kawasaki Robotics software Kawasaki K-ROSET
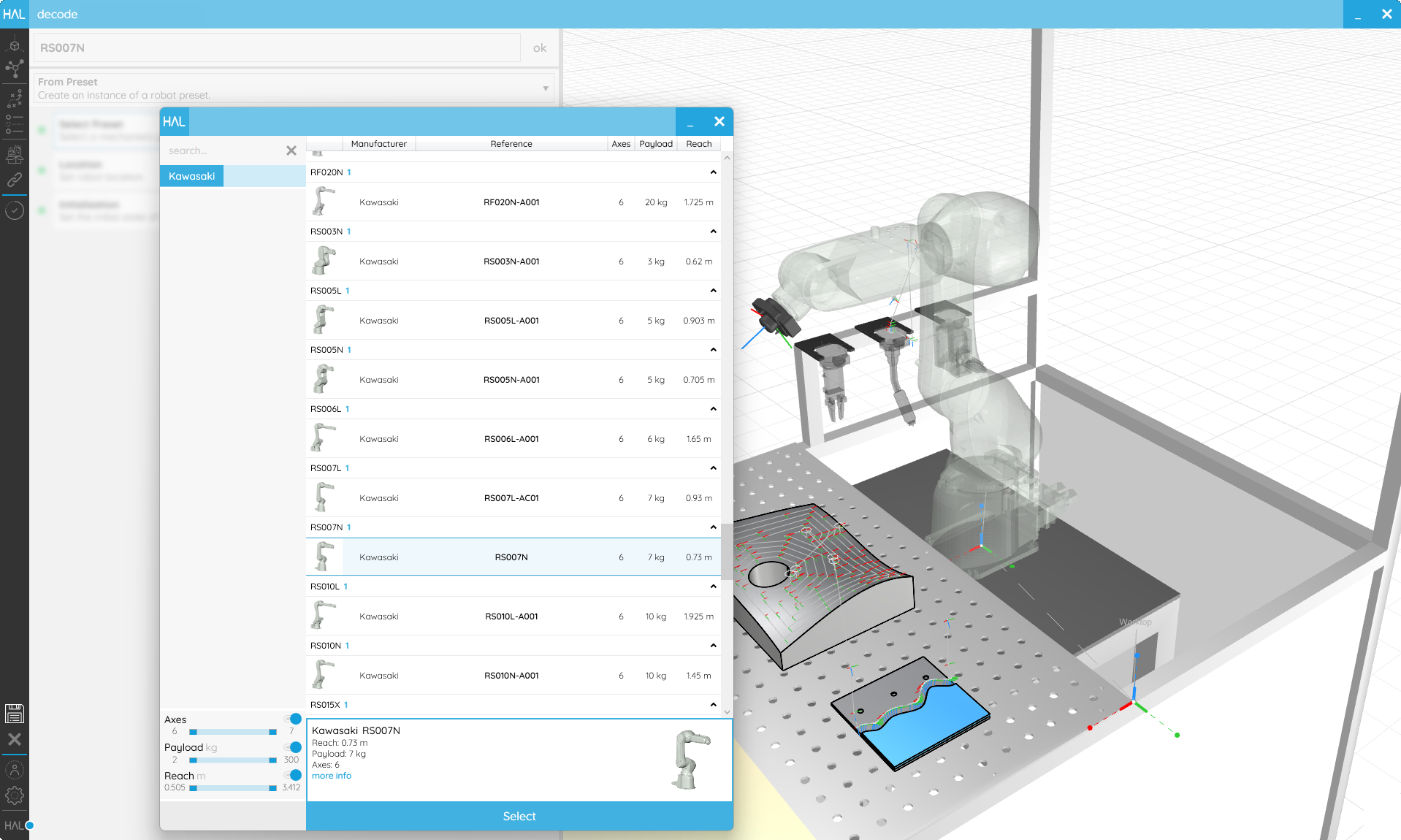
build a digital twin
A digital twin is a virtual representation of your Kawasaki robotic arm or Kawasaki cobot, similar to a Kawasaki Robotics software Kawasaki K-ROSET station. DECODE will then process this Kawasaki robot digital twin similarly to Kawasaki robot simulator K-ROSET.
Start by creating a digital twin of your Kawasaki robot arm, to simulate and validate machine behaviour.
decode simplifies this with:
robot programming and simulation software alternative to Kawasaki robot simulator Kawasaki K-ROSET for Kawasaki robot programmer
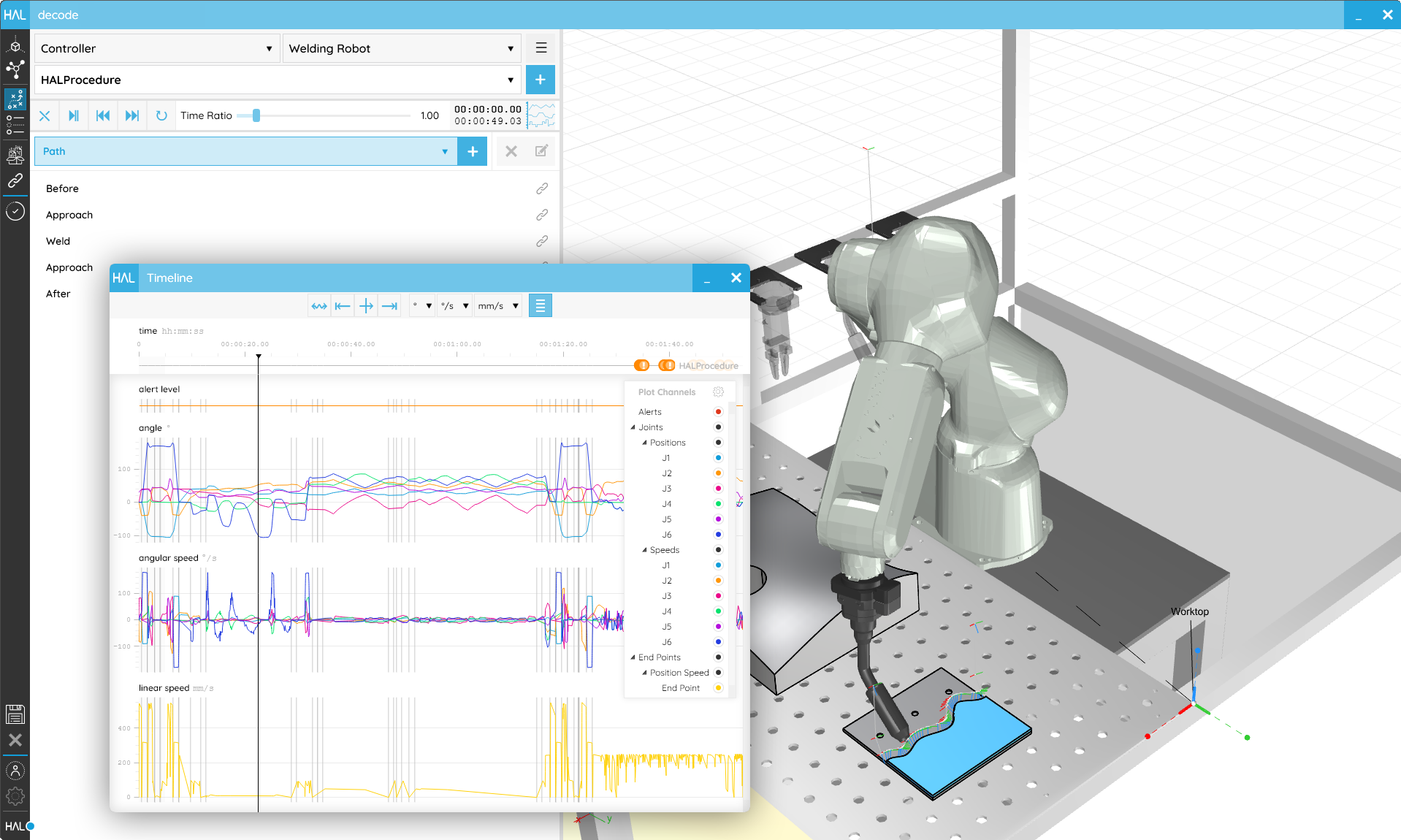
generate toolpaths
Whether you are just discovering Kawasaki robots or an expert Kawasaki robot programmer, decode gives you powerful tools to automate a large range of applications.
Quickly and easily program your robot by combining robot actions with our library of customisable toolpath generators.
2
3
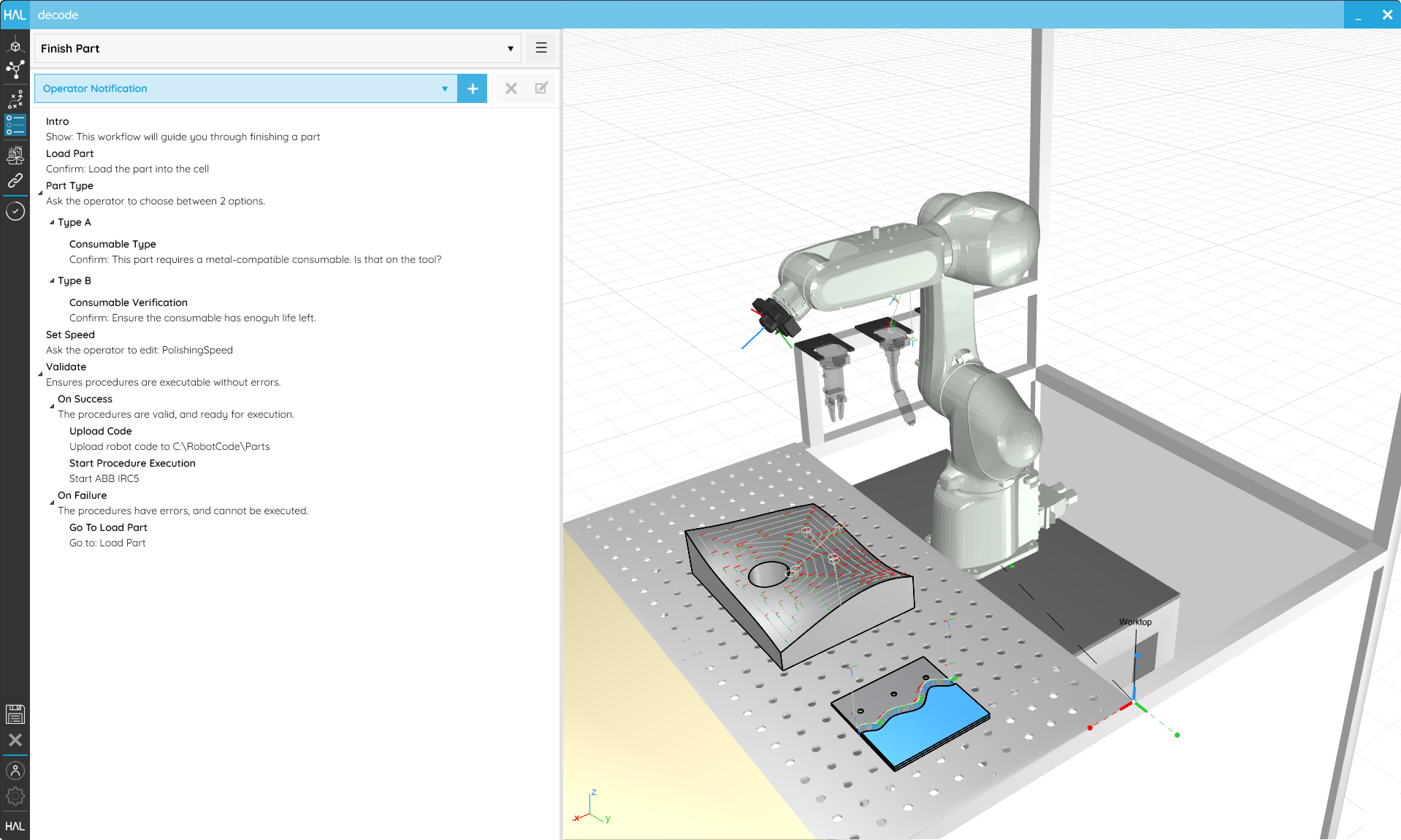
human-robot collaboration workflow
create a workflow
In decode, workflows provide a powerful way to define collaborative work instructions for operators, robots and sensors.
The best alternative to Kawasaki robot software Kawasaki K-Roset: DECODE, the best Kawasaki robot programming software & Kawasaki robot simulation software for Kawasaki robot arm and Kawasaki cobot
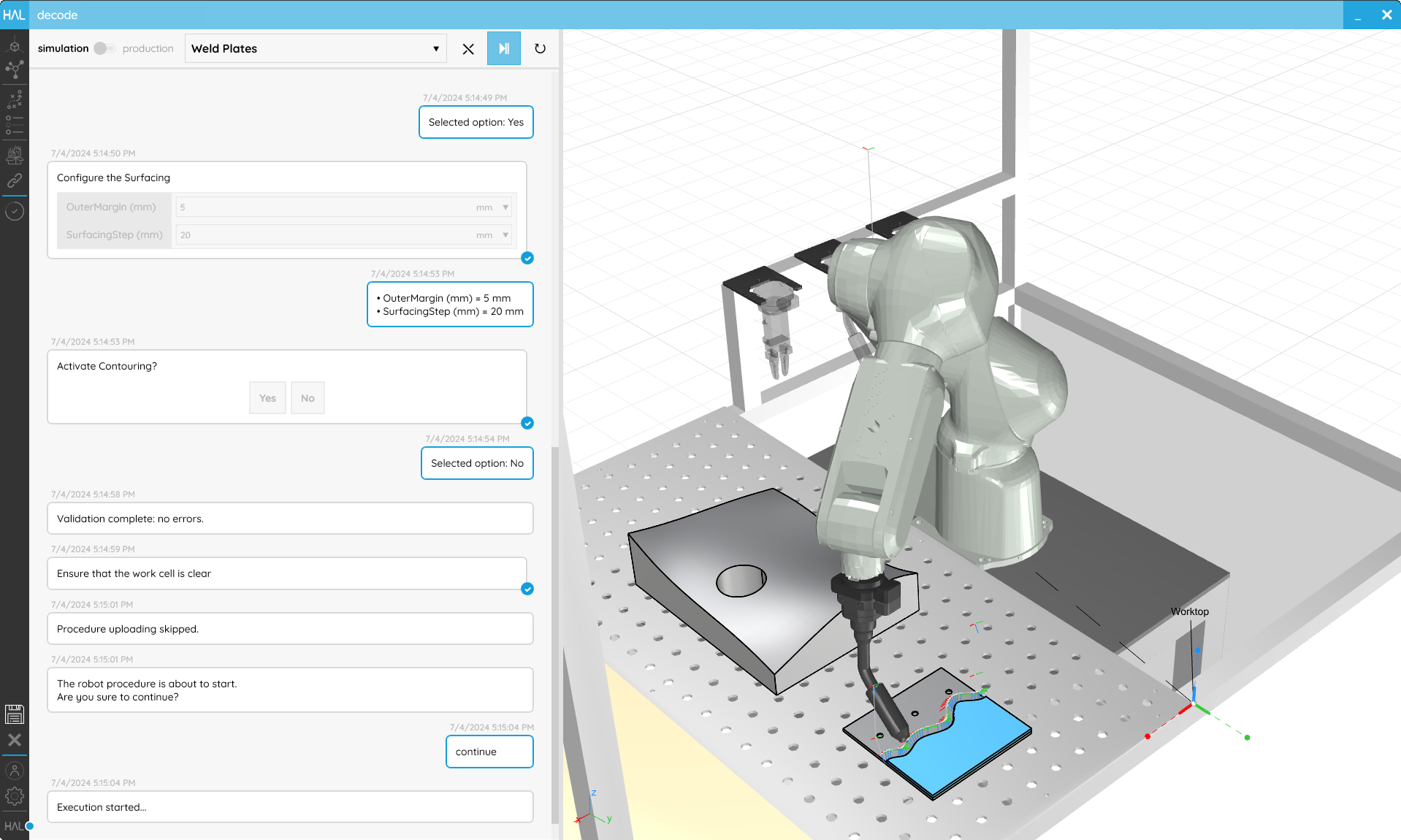
go!
That’s it, you are now a Kawasaki robot programmer, your first Kawasaki AS program, validated by our Kawasaki robot simulator, is ready to upload without even using Kawasaki software Kawasaki K-ROSET or another Kawasaki robot simulation software!
Your collaborative robot application workflow is now ready to execute in the robot cell HMI, guiding your operator through the process and asking for their input when required.
Support of Kawasaki robots is currently restricted to AS programming and execution monitoring, but additional features can be added upon request. If you have questions or don’t see your equipment below, please contact us.
KAWASAKI Robot Programming: Compatible Equipment
Become an expert Kawasaki robot programmer
