



HAL Robotics, Skanska, InnoTecUK, ABB, Skyjack, BRE
Navigation, Drilling, Anchor fastening
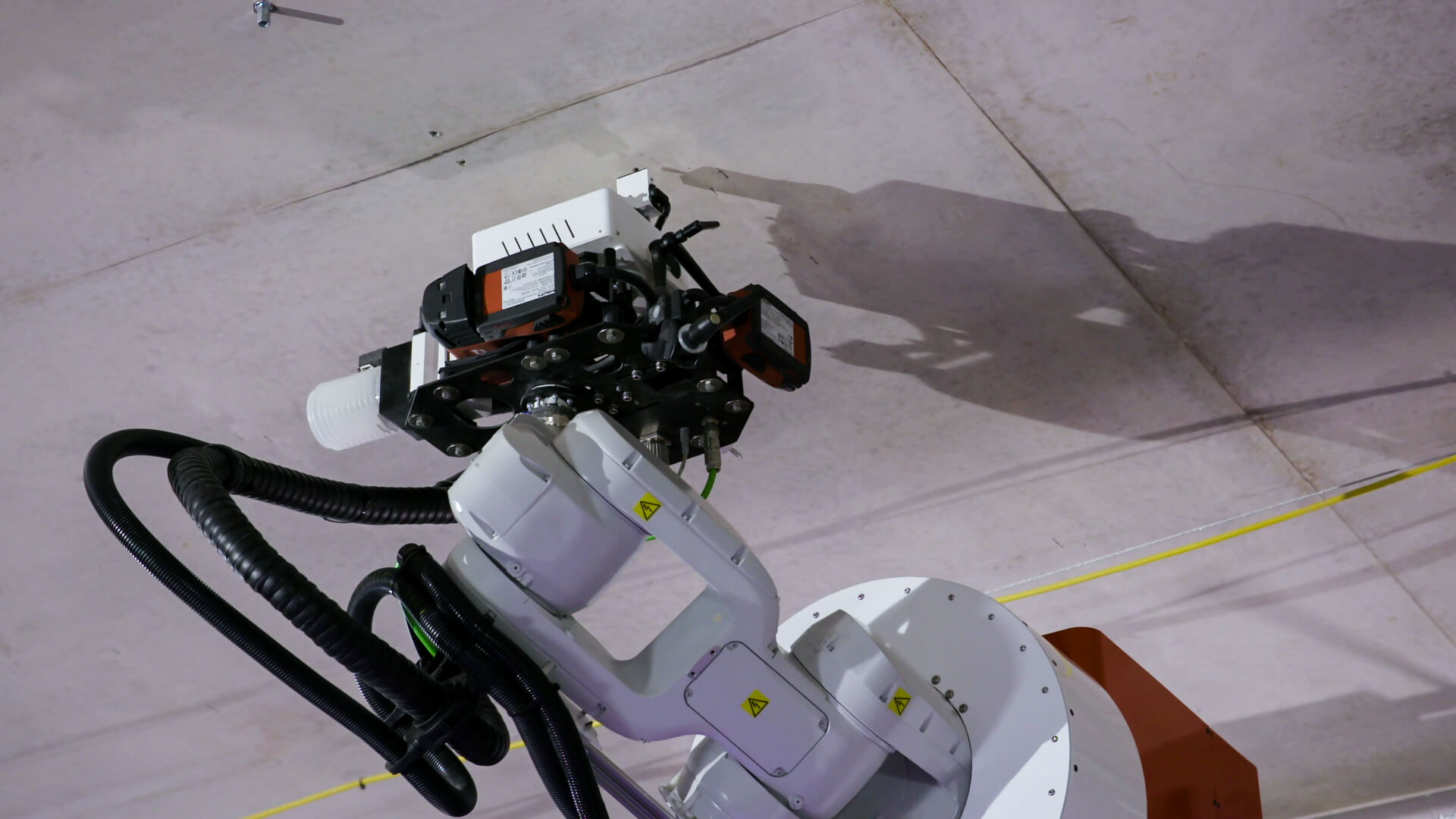
Mobile robot autonomously navigating a construction site to drill and fasten anchors in concrete slabs at locations read directly from a BIM model
Skanska, a global construction and development company, is increasingly exploring construction robotics through its UK branch.
The Collaborative On-Site Construction Robot (COSCR) project sought to develop a prototypic mobile construction robot, capable of autonomously navigating construction sites and undertaking required jobs based on data extracted from a BIM model.
The robot is designed to deliver construction activities that may otherwise be repetitive or potentially hazardous, such as drilling at height.
As a first proof of concept, the project focused on a drilling and anchor insertion application, which was trialled on a live construction site at Skanska’s Featherstone Building project in central London in early 2021. The project brought together construction expertise from Skanska, equipment expertise from Skyjack, legislative expertise from the BRE, and robotic expertise from InnoTecUK, ABB Robotics UK, and HAL Robotics to develop a holistic solution capable of handling the disparate challenges of on-site construction robotics.
The COSCR platform combines a sturdy mobile base, site sensing technology, and BIM-linked software systems, allowing it to navigate safely and accurately within a construction site.
It can be operated manually or autonomously. In manual mode, an operator uses a controller to move the robot around the site. In autonomous mode, the robot uses its onboard sensors, as well as maps derived directly from BIM (Building Information Modelling) data, to navigate itself safely around the site and perform tasks that have been scheduled by the user.
The robot was developed to specific size and weight constraints to maximise its potential to access the tightest corners of any site. The platform is tracked, which enhances the manoeuvrability, and features a telescopic mast fitted with a robotic arm, enabling it to reach heights of up to 4.2 metres.
Given that our co-founders have backgrounds in the construction industry, we naturally designed our software to serve as the ideal middleware for both off-site and on-site construction robotics. It seamlessly integrates with popular construction and design tools like Autodesk Revit and McNeel Rhinoceros. It enables us to extract construction instructions directly from building models and adjust objectives based on robot navigation data.
To learn more about our software modules for construction robotics or BIM-to-robot toolpath generation, please feel free to contact us.
Looking to get your robots do incredible things?