


ENPC Build'In Lab, Navier Laboratory, ABB, Simonin, Würth, Schunk
Multi-robot timber machining, Part Handling, Sawing, Milling, Drilling
Large scale prototypes demonstrating Design for Manufacturing and Assembly (DfMA) principles and structural optimisation concepts
The Navier Laboratory is a mixed research unit between CNRS, Ecole des Ponts ParisTech and IFSTTAR. They conduct research on the mechanics and physics of materials, structures and geomaterials, as well as their applications to geotechnics, civil engineering, transport, geophysics and energy.
Every year, they organise demonstrator prototyping workshops that introduce state-of-the-art research topics to engineering students. The 2017 edition focused on demonstrating structural optimisation concepts and Design for Manufacturing and Assembly (DfMA) principles by building a large-scale timber frame pavilion prefabricated with robots.
This short project aimed to bring industrial and academic partners together to achieve a tangible outcome within a week. The objective was to construct a doubly-curved timber pavilion using a pair of ABB robots and an array of machining techniques. The design brief included a number of constraints consistent with flexible Design For Manufacturing and Assembly (DfMA) principles: simplicity of connections, flatness of solid panels, and freedom of the overall form.
The outcome consisted of a reciprocal timber structure, braced by flat plywood panels. This innovative structural achievement owed much to the prior study of timber structures and complex geometry by specific project partners. Given the pavilion’s intricate geometry, each timber element required unique features. Notably, the ends of each structural beam had distinct angles, notches were necessary for aligning supporting elements, and unique grooves were cut into each beam to maintain the planarity of the bracing sheets.
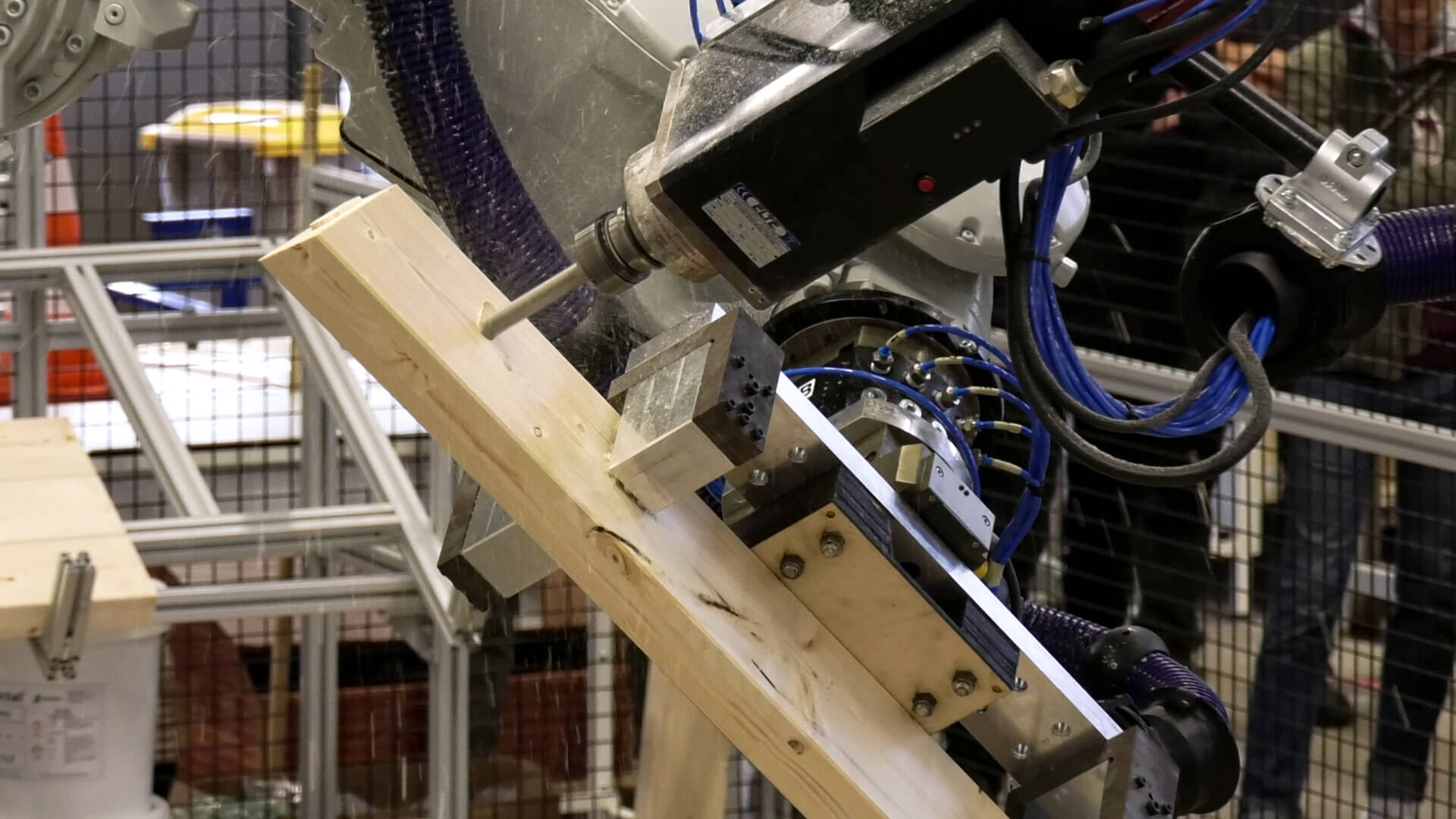
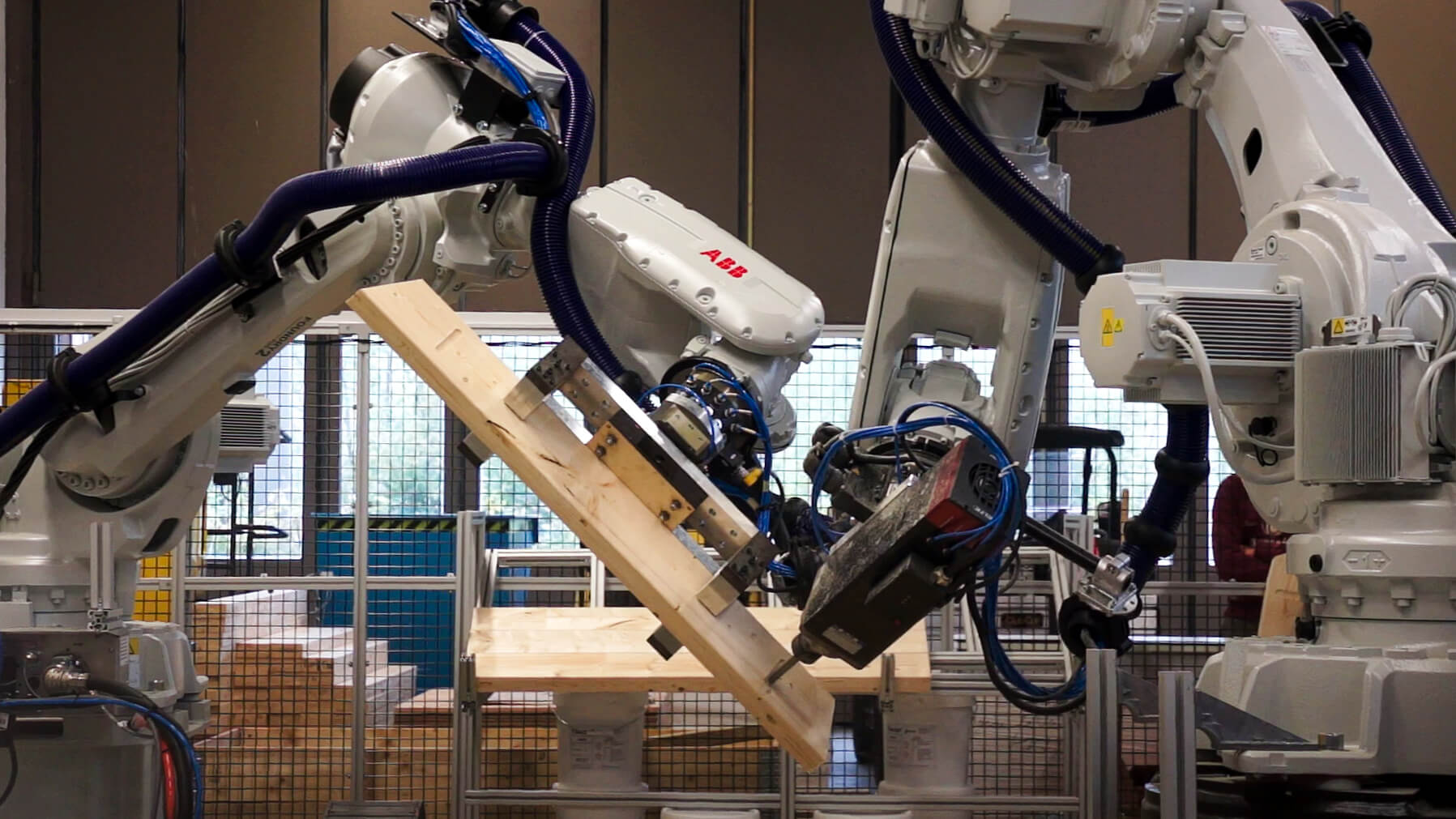
Two ABB IRB 6620 robots collaborated to manufacture the components of the pavilion. In the initial phase, one robot, positioned on a track, selected a timber beam and transported it to a stationary circular saw, where it cut the ends to the necessary angles. Subsequently, the beam was handed off to the second robot for milling the ends and creating any required notches. Finally, the manipulator guided the beam to a stationary drill to create pilot holes before placing the finished part on a palette for later assembly.
The entire robot programming and simulation for this project utilised HAL Robotics software embedded in the Rhino/Grasshopper CAD environment.
To learn more about our software modules for CNC machining, construction robotics or BIM-to-robot toolpath generation, please feel free to contact us.
Looking to get your robots do incredible things?